[ROS2 시작하기 - 0] 환경 셋팅
Setup Your Environment
Install
- Oracle VM VirtualBox
- ubuntu-20.04.5-desktop-amd64.iso
Environment
- Oracle VM VirtualBox
- OS : ubuntu 20.04
Configuration
- Memory Size : 4 or 8GB
- Hard disk file type : VDI
- Hard disk Size : 20 ~ 30GB
- Settings
- System → Processor → 3CPU
- Network → Attached to → Bridged Adapter
- Storage → Controller : IDE → Empty → Choose/Create a Virtual Optical Disk (your .iso)
- Installing ubuntu
- Install Ubuntu
- Minimal installation
- For full size Screen
sudo apt updatesudo apt install build-essential gcc make perl dkmsreboot → Devices → Insert guest Addition CD image → run → restart
(If it doesn’t work, try above process)
- Devices → Shared Clipboard → Bidirectional
- For upgrade every packages
sudo apt updatesudo apt upgrade- Useful terminator
sudo apt install terminator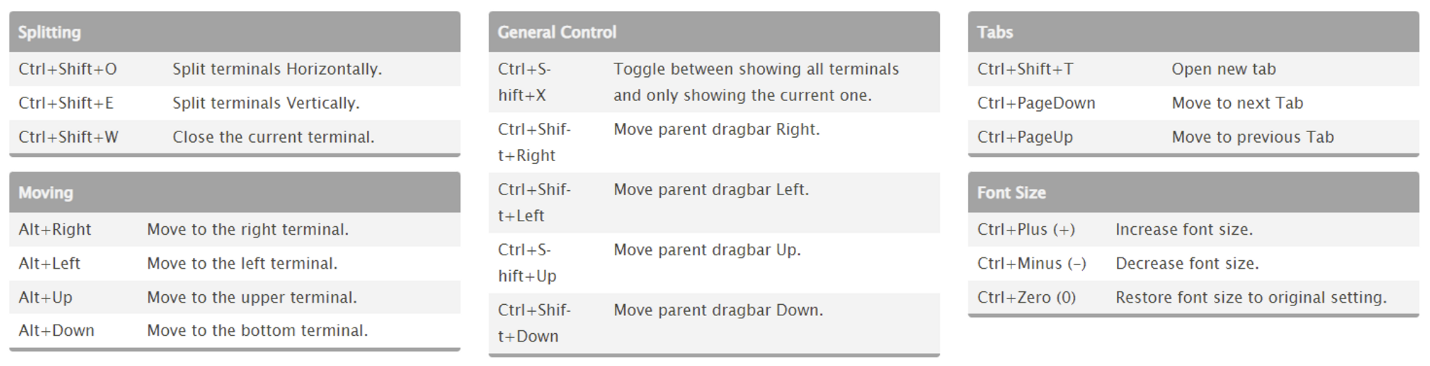
- Install VScode
1. Install curl
sudo apt-get install curl2. Download the Microsoft GPG key and copy it to the /etc/apt/trusted.gpg.d/ path
sudo sh -c 'curl <https://packages.microsoft.com/keys/microsoft.asc> | gpg --dearmor > /etc/apt/trusted.gpg.d/microsoft.gpg'3. Add repository to download Visual Studio Code
sudo sh -c 'echo "deb [arch=amd64] <https://packages.microsoft.com/repos/vscode> stable main" > /etc/apt/sources.list.d/vscode.list'4. fetch package list from the repository
sudo apt update5. Install Visual Studio Code
sudo apt install code6. Install Python
sudo apt install python3-pipInstall ROS2
Ubuntu (Debian) - ROS 2 Documentation: Foxy documentation
Ubuntu (Debian) — ROS 2 Documentation: Foxy documentation
Make sure you have a locale which supports UTF-8. If you are in a minimal environment (such as a docker container), the locale may be something minimal like POSIX. We test with the following settings. However, it should be fine if you’re using a differen
docs.ros.org
- To use ros2 command
gedit ~/.bashrc
# insert on last line
source /opt/ros/foxy/setup.bash- Install colcon
sudo apt install python3-colcon-common-extensions- To use colcon command
gedit ~/.bashrc
# insert on last line
source /usr/share/colcon_argcomplete/hook/colcon-argcomplete.bash- Create a workspace
mkdir ~/ros2_ws
cd ~/ros2_ws
mkdir src
colcon build
# if you have a problem, it is because of Network
# you can use network, if you set device -> Network -> attached to NAT
cd install
source local_setup.bash # whatever you can make in this workspace now!- To use workspace
gedit ~/.bashrc
#insert this in the last line
source ~/ros2_ws/install/setup.bashPackages
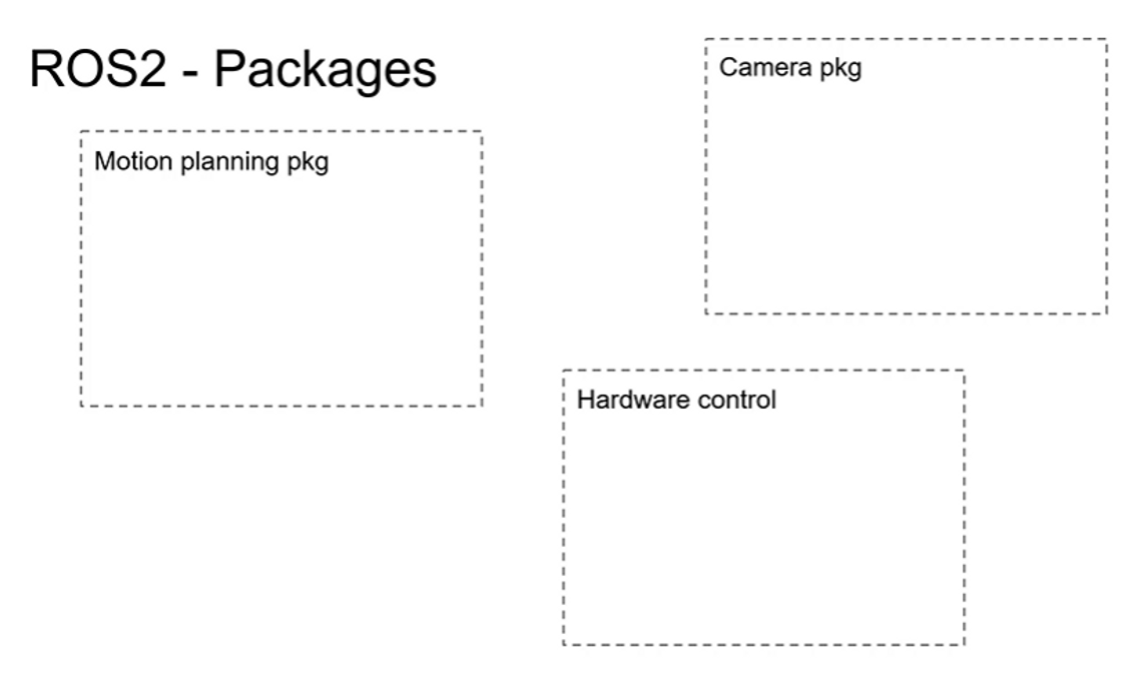
- Create new ‘python’ package
ros2 pkg create [name] --build-type ament_python --dependencies rclpy #python
ros2 pkg create [name] --build-type ament_cmake --dependencies rclcpp #c++After creating pkg, you can see package.xml. If you release it later, the following part will be changed.
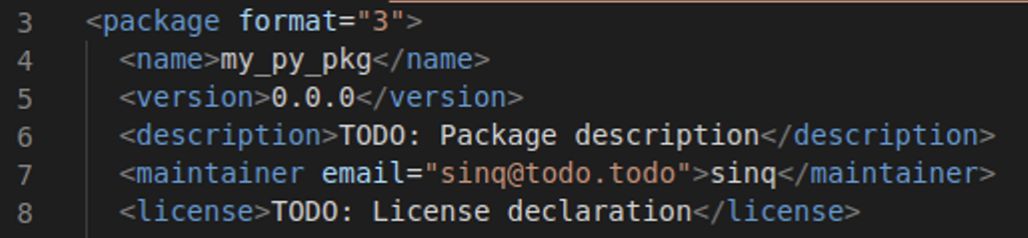
If you make a package, you should build
- Build only one package
colcon build --packages-select [name]